
INVISIBLE NETWORKS
Swarm robotics inspired by natural phenomena, such as shoals of fish, are able to flexibly adapt and respond to changing conditions in their environment. These systems offer huge potential for engineering real-world applications that benefit society and protect the natural world.
In a world of invisible forces, power no longer sits at the centre: it moves like a school of fish, fluid, responsive, uncatchable.
Imagine a school of fish. Each fish moves independently without any central control yet responds and reacts in beautiful synchrony with the other fish to environmental changes, such as an approaching predator.
In this project, ‘Invisible Networks’, I use robotic fish to demonstrate the nature of decentralised systems and the complexity they hold. The project transcends the basic notion of central control, showcasing how local interactions can cohere to create complex, emergent behaviours on a global scale.
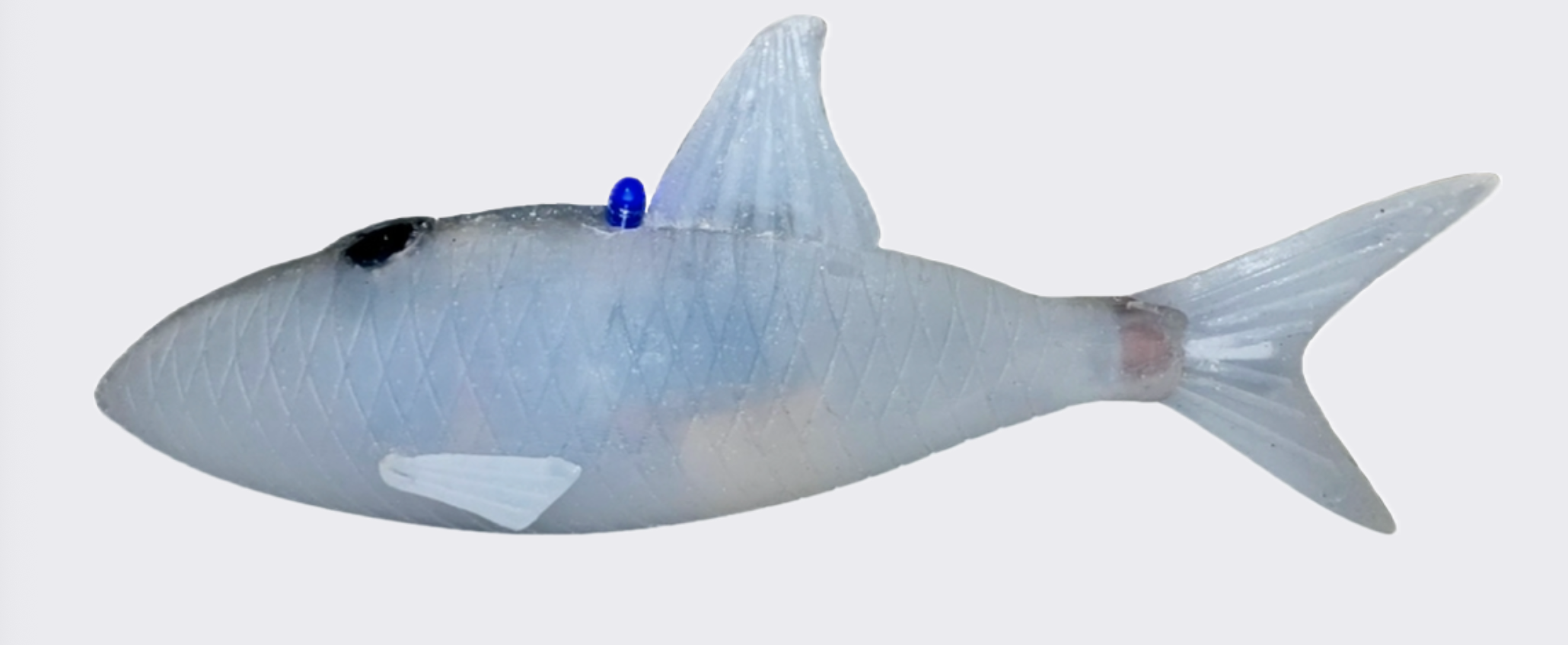
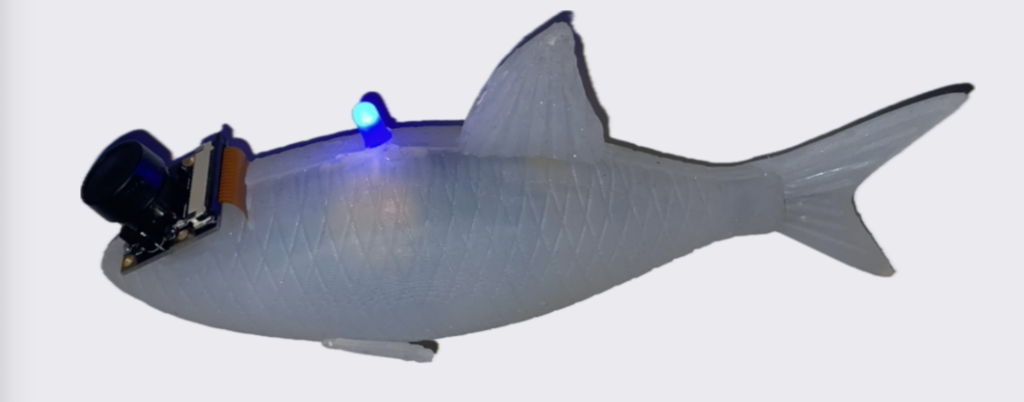
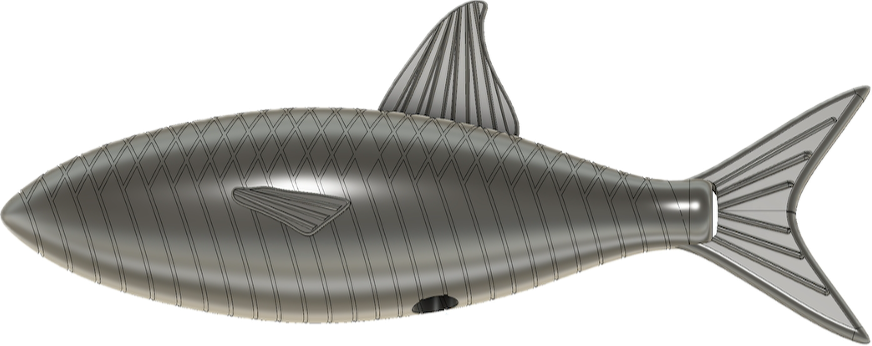
I engineered biomimetic ‘Swarm Fish’ focusing on soft robotics and hardware design. I made waterproof agents with silicon casting and developed custom wound electromagnetic actuators and for propulsion. By integrating a Raspberry Pi Zero in conjunction with computer vision algorithms, I was able to successfully mimic swarm intelligent protocols, demonstrating control systems engineering. The robots mimicked biological swarm behaviours based on visual detection of neighbours through real-time LED coordination and localised signal processing. You can refer to my github to see a more in-depth architecture of this project. This project was then accepted as a poster presentation at 2025 Ada Lovelace Colloquium.
