MODELLING SWARM BEHAVIOURS OF FISH
Here I am working as a research associate at Bristol Robotics Laboratory investigating collective intelligence and programming robotic agents to model the swarm behaviour of fish. This was in collaboration with a PhD student supervised by Prof. Dr Sabine Hauert.
The goal of this research was to develop a ‘locate and converge’ logic for the robot swarm, enabling multiple units to coordinate their movements to locate specific environmental targets without a central controller.
The decentralised communication utilises a peer-to-peer mesh network using UDP broadcasting on the Raspberry Pi Mosaix robots. This allowed the robots to share real-time environmental data such as the directional and target tags (ArUco).
The OpenCV pipeline is used to detect the ArUco markers. When a target is detected by a robot, they broadcast this information and the swarm acts as a global convergence toward the goal.
I built a dynamic reward system that mirrors biological competitive/cooperative strategies. Each robot’s “set-off” time for subsequent trials was calculated based on its previous performance, testing the long-term stability of the swarm’s balance.
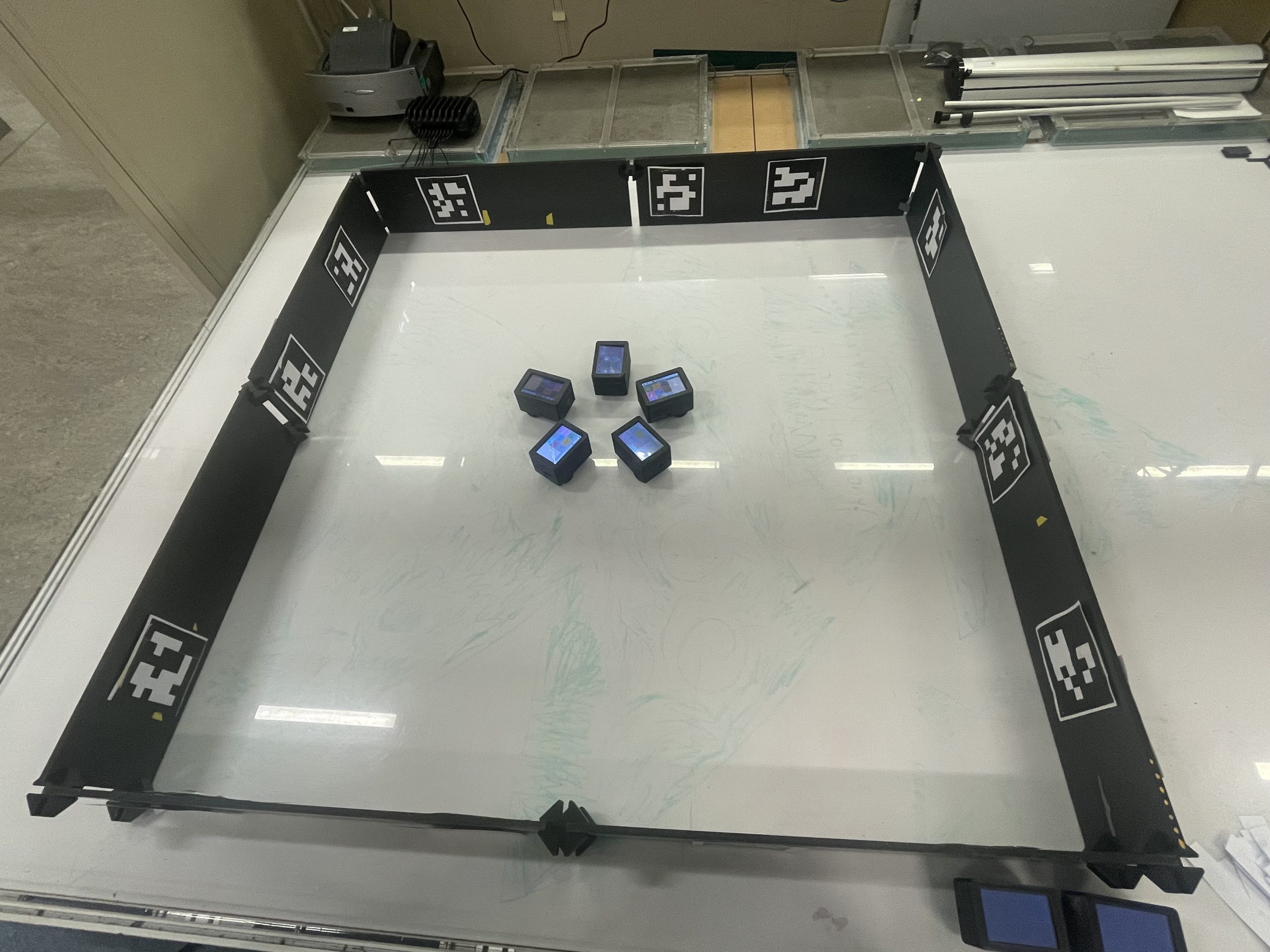
Tile robots made my Merihan Alhafnawi during her PhD at Bristol Robotics Lab.